こんにちは、ナチュロボです。レゴマインドストーム記事、4回目でございます。前回は、ソフトウェアの設定、音を鳴らすところまでいきました。

また、本の順番的にはここから「3. TriBot:the test robot」の作成なのですが、すでにロボットは作ってあるのです!
ということで、ついに今日は「4. motion」、実際にロボットを動作させる段階に突入でございます!わくわく。記事は、具体的な動作をお伝えしたい都合上、動画がメインとなります~。

直線に少し動かす
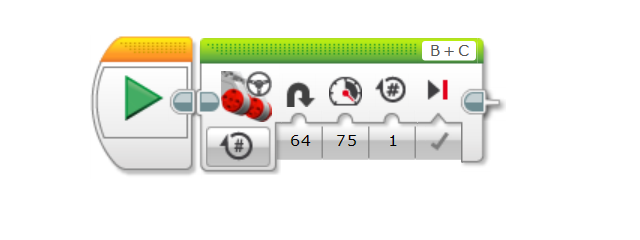
まずは、ものすごくシンプルなプログラムから。緑色のモーターブロックをスタートブロックの右側に接続、配置します。
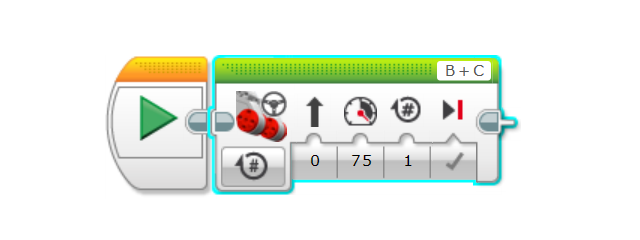
・B、Cのコネクタにモーターをつないでいるので、緑ブロックの右上には「B+C」と書かれていますね。
・左下の「♯」ボタンは、「回転」を意味するようです。ほかにも、角度指定もできるようです!
・↑の下の数字は-100~100を設定できるようで、0だとまっすぐ、-100や100になればなるほど、右や左方向に回転して進むようです。
・75というのはモーターの回転スピード。-100(後進)~100(前進)まで設定できます。
・♯の1は、タイヤを1回転、という意味だそうです!
…ということで、この配置でブロックをダウンロード、実行してみました!
おぉ、ほんのちょっと(タイヤ1回転分)動きましたね!記念すべきマインドストーム実動作第一号です~!嬉しくて3回もボタンを押してしまっています笑
90度、回してみる
なんとか、直線的な動きをやることができました!続いて、回転の動作もやってみましょう~。
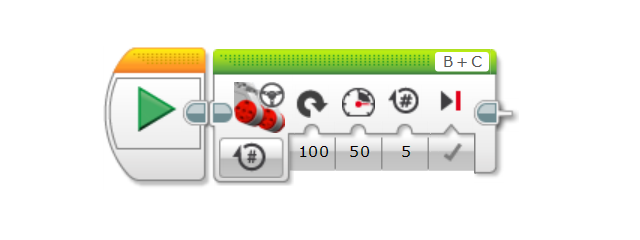
ブロックは上のように設定を変更。64という数字で90度回るかどうかは、タイヤと路面の状況にもよるようですね。ではでは、さきほど同様、さっそく実行!
なんとか、90度くらい回転してくれましたね!若干回りすぎている気もしますが汗。続いて、さらに回る具合を強くして、連続でタイヤ5回転分、動かしてみました。
くるくる~くるくる~、目が回るスピードで華麗に回転してくれました!
無線(Bluetooth)で動作
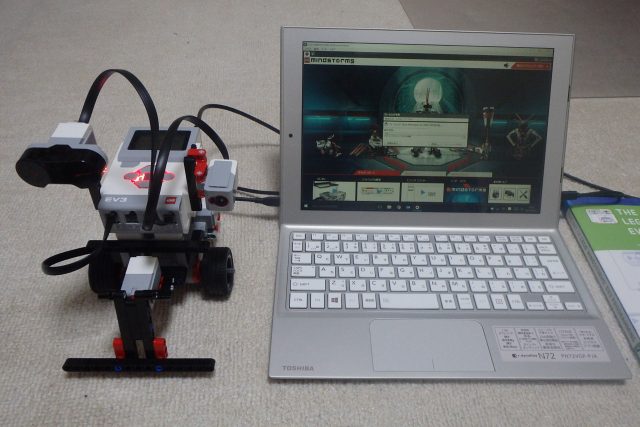
そしてここで問題が…!これまで有線(USBケーブル)でパソコンとEV3 Brickをつないでいました。この場合、一回一回ソフトをダウンロードし、線を抜き、Brickのボタンを押す…というのがなかなか手間がかかります。そこで、無線化してみることにしました!
無線の方法はWifiでもできるようですが、現在使用しているPCはBluetooth機能があるので、せっかくなのでこちらの機能を使います。やり方は簡単。
EV3 Brick側で「Bluetooth」「Visualize」のチェックマークをONにして、PC側のソフトでBluetoothの接続をチェック。Brick側い表示されるパスコードをPCに入力して、完了です!
無線接続後は、有線のような手間から解放され、PCで再生ボタンをクリックすれば、ロボットが動作を開始します!なんて素敵なんでしょう…!実際の動作がこちらです。
見事、PCからの指示一発で、ロボットが動作してくれました。
今日の感想
いやぁ、久々にロボットを実際に動かすことができて、感無量でございました。動作させるのも、基本的にデフォルト設定のままでもしっかり動いてくれるところが頼もしいです。
しかも、無線化にあたっても特段のトラブルもなくあっさりできたので、今後の動作の自由度がかなり広がりました!
次回は、もっと速度を上げてみたり、直線と回転を組み合わせた動作をやっていきますよ~。
それでは、また!
ナチュロボより