こんにちは、ナチュロボです!レゴマインドストーム記事、ついに10記事目となりました。前回はカラーセンサを使っておりました。

今回が本の「5.sensor」の最後の記事となります。いよいよ赤外線センサを使っていきます~。
なお、教育版の場合はジャイロセンサがあるようですが、私が入手したのは家庭版のため同梱されておりませんでした、悪しからず…。

赤外線センサと4つのモード

赤外線センサの部分アップです。この部分から赤外線(目には見えない)がでていて、その反射を検知することで、対象との距離や、その方向を知ることができるようですね。
モードについても、確認してみることにします。
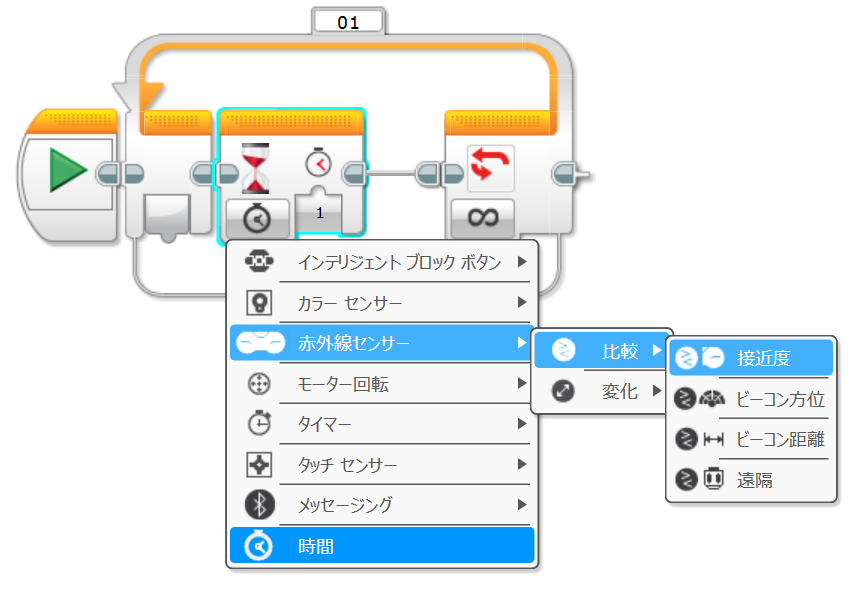
ふむふむ、「接近度」「ビーコン方位」「ビーコン距離」「遠隔」の4つのモードがあるようですね。
1. 接近度
このモードがポピュラーな使い方で、対象との距離を計測するモードです。
2. ビーコン方位
こちらは別途用意されているビーコン(リモコン)からの電波を検出し、その方向を検出できるようです。すごい!
3. ビーコン距離
このモードだと、ビーコンとの距離を検知できるようです。
4. 遠隔
このモードでは、ビーコンのボタンをどれを押すかに応じて、行動をコントロールできるようです!
簡単ですが、4つのモードの説明でした。ビーコンについては今回は記事にはしませんが、いずれ使う機会があるかと思いますので、その時に紹介しますね。
赤外線センサの前に何かをかざすと音がなる、プログラム
ではプログラム作成に移ります。使う赤外線センサのモードは、「接近度」です。こちらも画面右下のセンサの値をチェックしながら、しきい値を設定することになります。
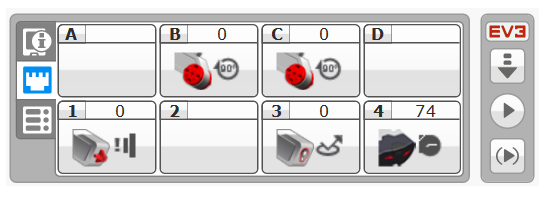
壁とTribotをある程度の距離で正対させて、そのときのセンサの値をチェックしてみます。おぉ、「74」でございますか。
ではこのくらいの値を目安として、しきい値を設定し、プログラムを組んでみました。
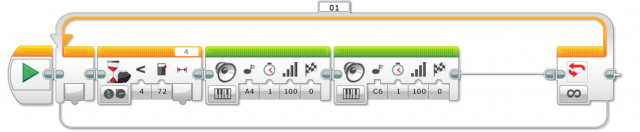
まずは赤外線センサで距離を測定し、その距離が72以下になった場合は、2つの音が1秒ずつ鳴る、というループを繰り返すプログラムですね。
さてさて、うまくいくでしょうか?動画をどうぞ。
おりょりょ?四角い箱の場合はしっかり反応してくれるようですが、手をかざしてみると、同じくらいの大きさにも関わらず、反応が鈍いですね。
赤外線はその対象の形や材質に反応の差がどうやらあるようです!これもやってみないとわからなかったことですね!わくわく。
今日の感想
ということで、「5.sensor」の最終編、赤外線センサの実験記事でございました。
これまでいろいろな動き、センサの感触をつかんできましたが、うまくいくもの、うまくいかない(もしくはその特性がばらつくもの)があって面白いですね!
こういった小さなところを自分で実験してみて、気づき、どうすればうまくいくか、それはなぜ起こるのか、ということを考えるのも非常に楽しいです!
ロボット製作、モータ動作、センサ検知、までこれまで一通り基本的な実験をやっていきましたので、いよいよこれからの章はいろんなプログラム上の作りこみをしていきます。
はてさて次はどんなことが今後できるようになるのか?楽しみですね。

それでは、また!
ナチュロボより