こんにちは、ナチュロボです。マインドストーム、6記事目でございます。前回の記事では、直線+回転を組み合わせてぐるっと戻ってくるような動作ができました。

今回は、Tribotと一緒に作ったリフトアームを動作させたり、止まり方(ブレーキ、コースティング)の違いを実験してみます!
内容は、引き続き本の「4.motion」の部分ですが、これで4章は最後となります。それでは、どうぞ!

リフトアームを動かしてみる
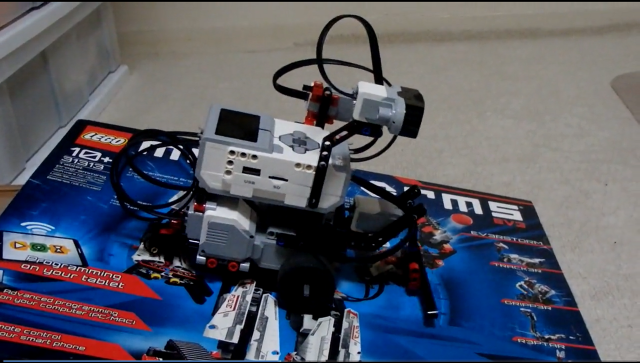
せっかく作ったリフトアーム!これを動かさずにそのままにしておりまして、いよいよ動作となります!歯車の部分が本当にうまく動くのか?心配です…。
リフトアームとTribotを、ケーブルでAの箇所に接続します。あとは、本の通りにプログラムを作って実行してみます。
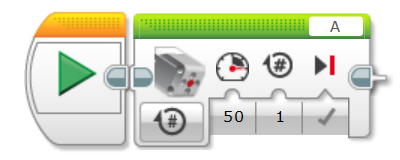
50のスピードで、1回転、動作させるという意味のブロックになります。この数字の値を-50に変更したものが下のブロックです。
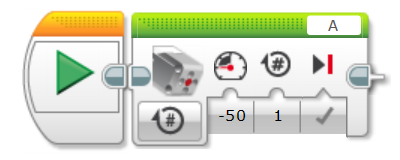
動画にて、50で動作後、-50で動作させてみました!その様子がこちらの動画です。
おぉ、スパッと動いてくれました!ここで、注意点がひとつ。
このアームの動作には可動域の限界があり、もし2回連続で同じスピードで動作させてしまうと、アームとブロックが干渉してしまい、モーターに過負荷がかかってしまいます!
そうなってしまった場合はあわてずプログラムを停止しましょう。そして、その後ゆっくり歯車をもとに戻しましょう。私は2回、やってしまいました汗
止まり方の実験をしてみる
ではこれで4章最後になります!最後は、止まり方の違いの実験です。このソフトではモーターの止め方は2種類あるようです。
ひとつは、ブレーキ(Brake)。ブレーキは、タイヤを所定の角度まで回したら、それ以上回転しないように、しっかりブレーキをかけるようにすることです。

上緑色のブロックで一番右側に「▶|」となっている場所が、ブレーキをすることをしめしています。オレンジ色のブロックは待機ブロックで、5秒間待つ、という意味になります。
つまり、動いて、止まる、5秒待つ、を2回繰り返すプログラムですね。では、動画をどうぞ!
2回とも、ピシっと止まっていることがわかりますね。
ではこれに比べてブレーキと違う止まり方が、「コースティング」です。
コースティングでは、ブレーキのようにモーターをしっかり止めずに、やや緩くモーターが回る状態となります。
そのため、急ブレーキよりは急な衝撃がロボットにかからないため、大きなロボットを動かす時にはこちらの設定のほうがよさそうですね。

上がコースティングに変更したブロックです。今度は緑のブロックの右側の部分が「▶▶」となっているのがわかります。
この止まり方が「コースティング」の指示となります。それでは、動かしてみた動画をどうぞ!
どうですか?コースティング。ちょっとわかりにくいですが、ブレーキの動画と比べて注意深くみてみると、こちらのほうが停止後もロボットが少し動いているのがわかりますね。
4.motion,終了!次はセンサを使ってみます
ということで、ついに4章が終了しました。次は5章になります。次はいよいよ、センサを使ったプログラムを扱うことになります!
レゴマインドストームでは他に、距離センサ、タッチセンサ、カラーセンサがあります!どんな認識をしてくれるのか、楽しみですね~。

それでは、また!
ナチュロボより