こんにちは、ナチュロボです。レゴマインドストーム、12記事目でございます。前回が本の「6.program flow」の内容、ライントレースプログラムと実験の様子でございました。

今回は「7. the WallFollower program: navigating a maze」の内容です。壁伝いに走ることで、迷宮を脱出するぜ!なプログラム作成です。ワクワク。
それでは、いきまっす!

ロボットモードチェンジ!赤外線センサを右側へ

Tribot君「モードチェンジぃ!!!」

Tribot君「フッ、変身完了…!」
…
まぁ、ご覧の通り、右側に付け替えただけですけどね!
小学生だと変身中にちゃんと効果音を口ずさむ必要もありますよ!「プシューっ!」的な。あ、そういえばすでに私は年齢と肉体は大人になってしまったのであった…。
プログラム作成、パラメータ調整
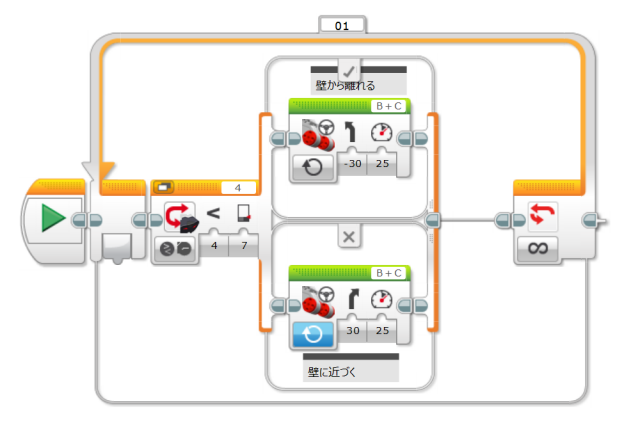
…さて、気を取り直して、プログラムを作成していきます。作成したプログラムはこちら。
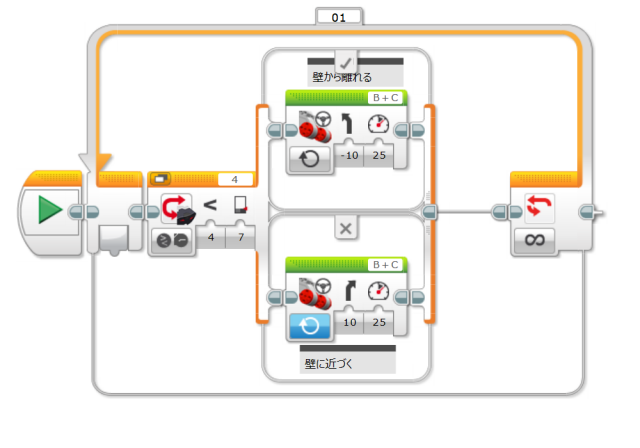
使っているブロックは4つ。一番外側のループブロック(オレンジ色)、内側のスイッチブロック(オレンジ色)、真ん中のステアリングブロック(緑色)2つです。
条件は、赤外線センサの強度が7より小さければ(つまり、距離が近ければ)左側へ回転、7より大きければ(つまり、距離が遠ければ)、右側へ回る、というプログラムですね。
そして、ここでポイントとなるのが、回る強さ。上記のプログラムでは10にしていますが、どのぐらいが一番いいのか?は実験してみたほうがよい、とのこと。ほうほう。
ということで、「-10」「10」の値をそれぞれ「-20」「20」、「-30」「30」にした場合、どれが一番よさそうか?を実験してみることにしました。プログラムは以下の通りです。
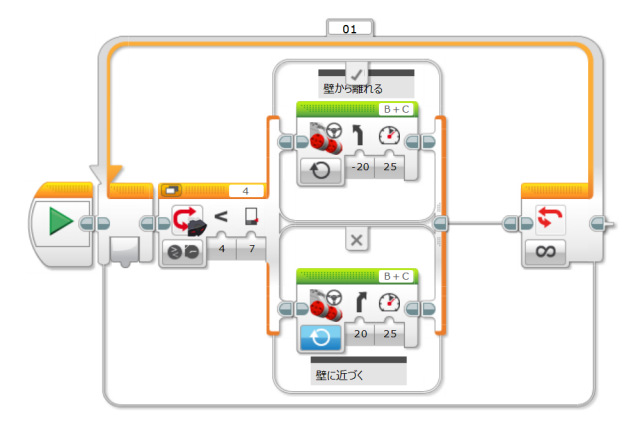
これは、「-20」「20」の場合のブロック。
続いて、「-30」「30」の場合のブロック。さて、どれが一番それっぽい動きになるかな?実験してみます。
う~ん、10の場合はなめらかではあるけれど、ちょっと力強さがほしいところ。一方で、30は、ギザギザ動きすぎて、若干無駄が多いような気が。
…ということで、教科書の答え通りにはなってしまいますが(爆)、20にするのがちょうどいい!と感じたのがナチュロボの感想です。
今日の感想
以上、迷宮を脱出するために欠かせない!壁伝いに直進するプログラム&実験動画でございました。
回転ブロックひとつとっても、そのパラメータをいじることで大きく動きが変わってくる…、試行錯誤のしがいがありますね。
でも、ロボットなんだから、そこも自動でいきたいなぁ~、というのが次のステージです!そういったステージまで、このブログでお伝えできればと思っております~。
では次回は、直線動作が完了したので、角をうまく回転できるプログラムを追加していきます!シンプルな迷宮であれば、直線と角を攻略できさえすれば、脱出できるはず…!

それでは、また!
ナチュロボより