こんにちは、ナチュロボです。マインドストーム、7記事目でございます~。前回の記事では、4.motionの完結編ということで、リフトアーム動作、ブレーキ・コースティングについて学びました。
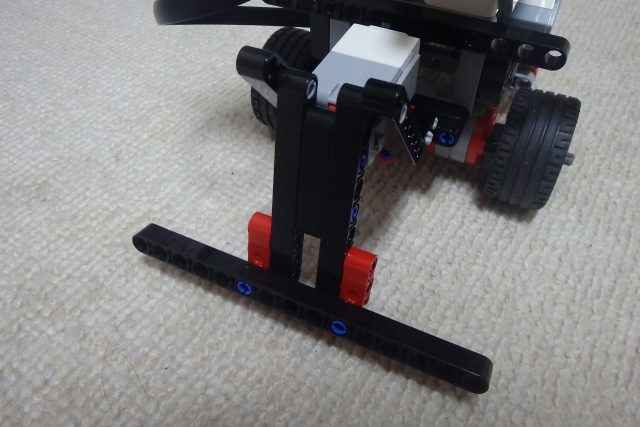
今回からは、いよいよセンサ編、「5.sensors」に突入です!Tribotに装着したタッチセンサによる動作を、実験してみました。それでは、どうぞ!

タッチセンサ(バンパー)がタッチしたら、停止する
ではいつものように、マインドストームのソフトを立ち上げて、プロジェクトを作成。その後、ロボットをONにし、Bluetoothでつなげておく。
…うん、だんだん慣れてまいりました!ではではさっそく、センサのブロックを配置してみます。
…うん?どうやらなんと、これまでに使用した「待機ブロック」を利用して、センサの反応をみることができるようです!
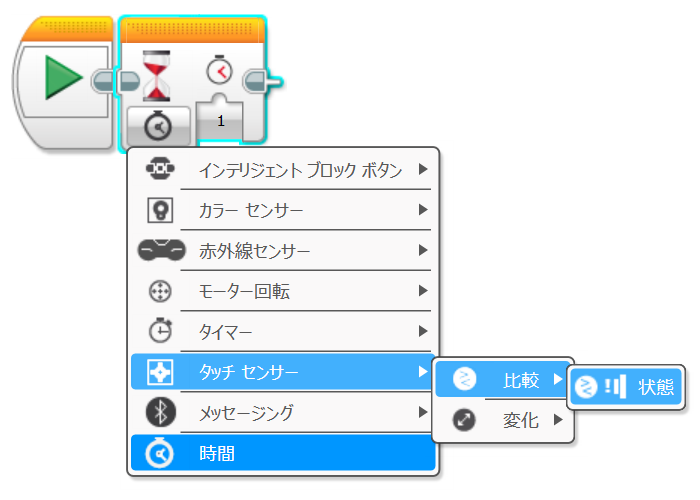
つまり、何らかのセンサの条件が合致するまで、待ち続ける、という意味になるのですね!ほうほう。
そして、今回は「タッチセンサー」「比較」「状態」を選択します。状態は、「押す」の状態になった場合に、次のブロックに進むようになる設定ということですね。
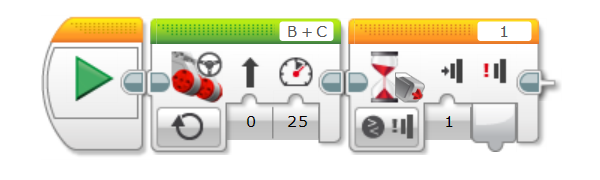
ということで、まずは緑のステアリングブロックでまっすぐ進み、タッチセンサが反応するまで進み続けて、タッチセンサが反応したら、動作終了、というブロックを組んでみました。それでは実際の動画をどうぞ!
おぉ、これまたシンプルな動きですが、Tribotの先端のタッチセンサに触れたら、動きが終了しましたね。狙い通りです!
タッチセンサが反応したら、後退、回転、また直進…を繰り返してみる
ただ単に止まるだけでは芸がないので、次はこのプログラムに新たなる動作を加えます。
タッチセンサが反応したら、障害物から後退して離れていき、その後約90度回転、そしてまた直進…を繰り返すプログラムにしてみます。
実際に作ってみたプログラムがこちらです。

…ちょっととたんに難しくなってしまいましたね汗
基本的には灰色のコメントに記入している動作をブロックで担当し、その動作をループする、という感じでつくっています。
さて、Tribotを動作させると、理想的にはず~っとぐるぐる、ある空間内で動き続けるはずですが、どのような動きになるでしょうか。では、動画をどうぞ!
障害物にぶつかって、後進、回転、直進…すべてうまくいきました!
…ですが、やはり回転角度をきっちり指定することが難しく、最後にはうまく障害物がある領域にぶつかれず、空間から離脱していきました笑
Tribotも、閉ざされた空間でずっと同じ行動はちょっと…とでも思ったのでしょうか(そんなことはありません笑)
今回の感想
ということで、まずは「タッチセンサ」を組み込んだ動作をさせてみた記事でございました。
単純な動きを記述して動作するより、ずっと可能性が広がっていく気がして、楽しめました!それでは次回は、「カラーセンサ」を使った動作にトライしてみますよ~。

それでは、また!
ナチュロボより