こんにちは、ナチュロボです。レゴマインドストーム、14記事目でございます。前回は本の「7. the WallFollower program: navigating a maze」の内容の後半、角を回転するプログラムでございました。

今回はプログラムは作りませんが、その代わりに段ボール迷路をつくりました。果たしてそんな大きな迷路でもちゃんとプログラムは動作するかな?を実験してみます。
それでは、どうぞ~!

段ボール迷路を設計・製作しました
段ボール迷路、設計!
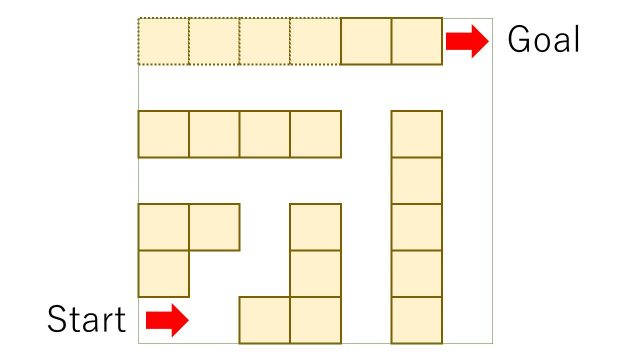
どんな迷路にするか考えましたが、我が家の部屋のサイズが小さいのと汗、段ボールづくりが大変になるかも論があったので、とりあえず上記くらいの迷路(7×7サイズ)にしました。
色がない部分が走れる部分、色がついている部分が走れない部分(段ボール部分)でございますね。
このくらいであれば、無理なく迷路を作れそうです!では、さっそく段ボール迷路製作に移ります~
段ボール迷路、製作!

段ボールそのものは我が家にたくさんあったので、はさみでチョキチョキっと、作りました。なんだかんだで1時間程度、かかってしまいました…。指の皮剥けちゃって痛い…涙。
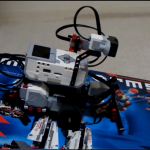
そして完成!その様子は上記の写真の通りです。ところどころ違う段ボールがあったり、高さやサイズがそろっていなかったり、衣装ケースがあったり…汗。
…生活感出しっぱなしやんけ!
まぁ、身近にあるものをちゃんと活用するのもオリジナルアイディアということで(白目)
プログラムは、これまでに制作したものを利用
プログラムそのものはこのために作り直してはおらず、前回の記事のものをそのまま使います。念のためプログラムのスクショを張り付けておきます~。
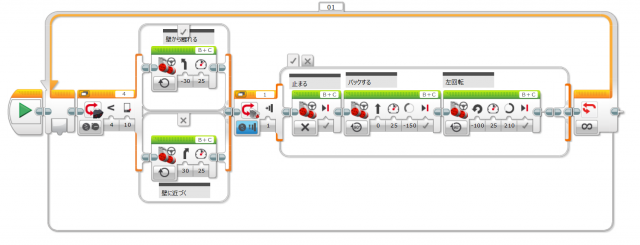
前回のプログラムはすでにレゴの中に入っております。
ということで!今回はパソコンを起動してプログラムをダウンロードする必要もなく、レゴを起動し、スイッチを押すだけでプログラムを開始してくれるのです~!便利。
ロボット迷路脱出、スタート!
ではこれで準備万端です!さっそくレゴのスイッチをいれて、スタート!脱出の様子は動画でどうぞ~。
いかがでしたでしょうか。ちょっと、ターンの回数が多く、無駄な動きが多くなってしまっていますね。
ある程度の距離になったら直線動作をするはずなのですが、あまりうまくセンシングできていないのが原因と思われます。
ので、より無駄がない動きをするためには、センサの検出パラメータを調整するとよいでしょう!
…え?それは自分でやらないのかって?
それはいまこの記事を見たそこのあなた!におまかせします(´・ω・`)汗
今日の感想
以上、段ボール迷路設計製作と、その迷路を脱出するロボット実験の様子でした。
ターンばっかりの動作が多くなってしまったものの、なかなか大き目な迷路であっても、脱出できることがわかりましたね。
どういった経路をたどってロボットがゴールするかはすぐにわかるのですが、ロボットを実際に動かしてみると様々なトラブルに見舞われます。
それをどうすればいいか考えて、攻略していくことが、一つの楽しみですよね~♪
さて、次は8章!使うブロックの種類を増やして、応用範囲を広げていきますよ~!

それでは、また!
ナチュロボより